プレスリリース要約
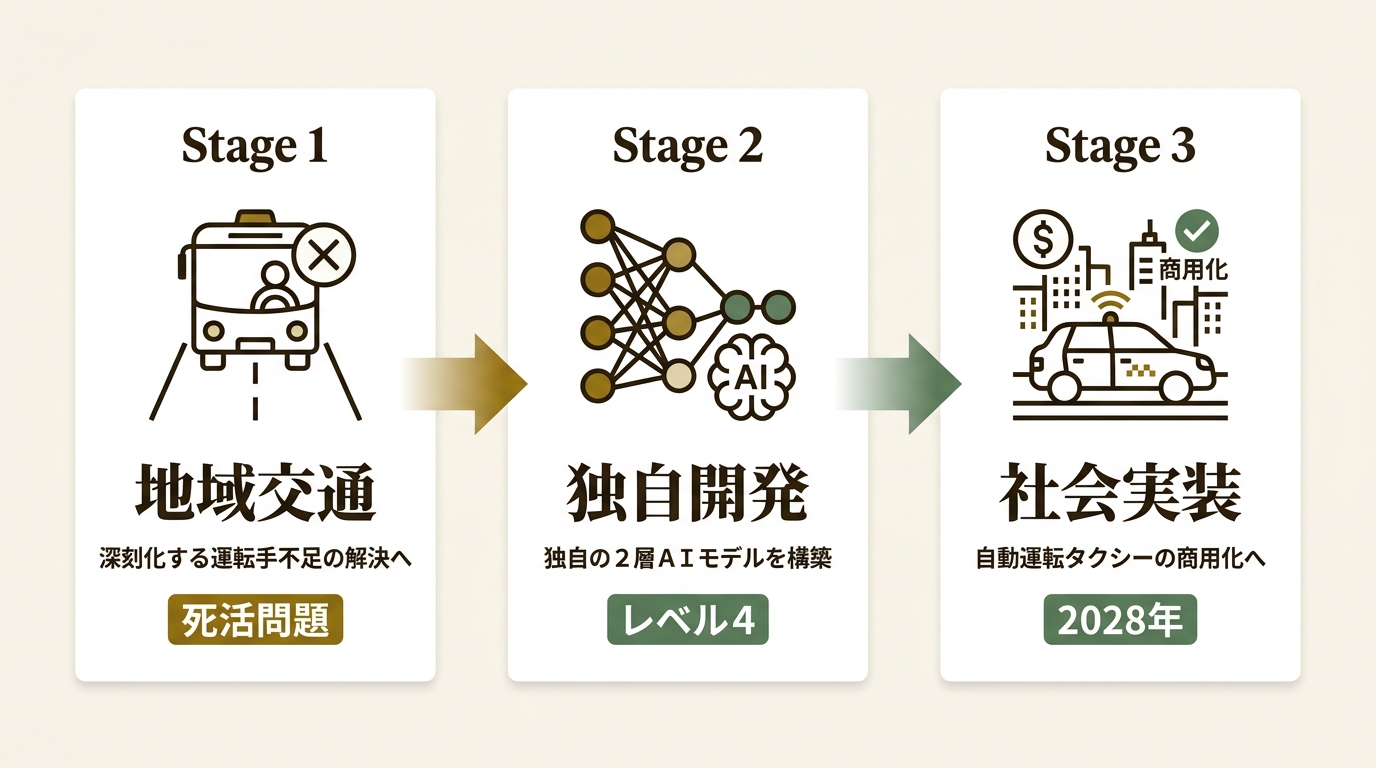
モビリティスタートアップのnewmoが、経産省とNEDOが推進する生成AI開発支援事業『GENIAC』の第4期に採択されました。同社は日本固有の複雑な交通環境に対応する独自の自動運転AI基盤モデルを開発し、深刻化するドライバー不足と地域交通の維持困難という社会課題の解決に挑みます。
newmoは、国家プロジェクトである『GENIAC』において『Fast/Slow連携アーキテクチャによる自動運転タクシーの実現』をテーマに掲げ、1年間の開発事業に着手します。この開発では、安全性と説明可能性を両立した『レベル4(特定条件下における完全自動運転)』の実現を目指します。具体的には、高度な状況判断を行う『Slowモデル』と、車載GPUでリアルタイム制御を行う軽量な『Fastモデル』を非同期で連携させる、独自の2層AI基盤モデルを構築します。これにより、通信環境が不安定な地域でも安全な走行を可能にする計画です。
同社の最大の強みは、研究開発にとどまらない迅速な社会実装力にあります。newmoはすでに大阪、神奈川、東京、沖縄でタクシー事業を展開しており、グループ全体で約1,400台の車両と2,400人以上の従業員を抱える事業基盤を有しています。さらに、2025年には堺市および大阪市と自動運転タクシーに関する連携協定を締結。2028年のレベル4商用化を見据え、国の『自動運転社会実装先先行事業化地域』にも選定されている堺市などで、実証実験を強力に推し進めています。
Journalポイント
実はこれ、人間の脳のように 『じっくり考えるシステム』 と 『直感的に素早く動くシステム』 を組み合わせたAIを開発しているんです。
え、AIの中に2つの異なるシステムが同居しているということですか?具体的にどうやって動くのかとても気になります。
実は今、日本の複雑な道路状況に自動運転を対応させるという大きな課題があります。そこで、歩行者の意図などを読み取る『Slowモデル』と、車載カメラで瞬時に危険を避ける『Fastモデル』を連携させる仕組みが必要になったのです。
でも、それって従来の自動運転システムと何が違うんですか?もともと障害物は検知できていましたよね。
従来のシステムはルール通りに動くだけでした。しかし今回は、画像と言語を処理する 『VLM』 という技術を使い、例えば『あの歩行者は横断歩道を渡りたそうだ』といった高度な文脈理解をAIが行う点が異なります。
なるほど!だから日本特有の複雑な街並みにも対応できるのですね。ただ、その高度な処理を車載カメラだけでリアルタイムに行えるのでしょうか?
そこを解決するのが『Fastモデル』です。鳥瞰図的な空間認識技術である 『BEV』 を活用し、車載の軽量なGPUだけでリスク判定を高頻度で行います。通信が途切れる山間部でも安全に動作する設計です。
素晴らしい仕組みですね。ところで、この技術で目指している レベル4 の自動運転というのは、具体的にどのような状態を指すのですか?
レベル4というのは、特定のエリアや条件下においてシステムがすべての運転操作を完全に自動で行う状態のことで、乗務員が乗車しない自動運転を指します。newmoはこのレベル4の自動運転タクシーを 2028年 までに商用化することを目指し、自治体との実証実験を急ピッチで進めています。
なるほど、2028年ならもうすぐですね!日本の交通インフラを救う技術として、今後の進展がとても楽しみになりました。
newmo株式会社
- 代表
- 青柳 直樹
- 所在地
- 東京都港区虎ノ門3丁目5番1号 虎ノ門37森ビル 13階
- URL
- www.meti.go.jp/policy/mono_info_service/geniac/index.html